|
|
Kalango
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
 Hors ligne Hors ligne
Messages: 5648
Eric
Posteur à 36%
  
 Safari 0.8.2  Mac OS
|
 |
« Répondre #91 le: 19 Février 2021 00:38:24 » |
|
Arnaud,
si ta VHF est équipée dune résistance (je ne vois pas pourquoi) elle doit être placée à lextrémité du backbone. Est-ce que ton enregistreur récupère bien tous les messages des capteurs connectés au bus ? si cest le cas ton réseau fonctionne bien.
vérifie également que ton alimentation est suffisante par rapport à la charge des équipements je ne sais plus combien de trucs on peut connecter sans pb sur un backbone.
pour les paramètres du P/À, tu nas pas trouvé de doc dinstallation sur le net ?
|
|
|
|
|
 Journalisée
Journalisée
|
Eric
|
|
|
Arnaud78
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 2437
Arnaud
Posteur à 29%
Safari 0.8.2 Mac OS
|
|
« Répondre #92 le: 19 Février 2021 11:36:10 » |
|
Arnaud,
si ta VHF est équipée dune résistance (je ne vois pas pourquoi) elle doit être placée à lextrémité du backbone. Est-ce que ton enregistreur récupère bien tous les messages des capteurs connectés au bus ? si cest le cas ton réseau fonctionne bien.
...
Merci Eric pour ta réponse. Effectivement, le concessionnaire avait positionné la VHF à l'extrémité avant que je n'y ajoute l'enregistreur. L'enregistreur à eu l'air de fonctionner correctement sur les 2 fois où je l'ai testé : 1 fois sans bouchon, 1 fois avec... Moralité, je ne suis plus sûr de rien donc je pense suivre les conseils de Thierry et mesurer la résistance directement sur mon backbone NMEA2000 pour en avoir le coeur net Arnaud,
...
vérifie également que ton alimentation est suffisante par rapport à la charge des équipements je ne sais plus combien de trucs on peut connecter sans pb sur un backbone.
...
Ca a l'air d'être OK. Quels seraient les symptomes si c'était insuffisant ? ...
pour les paramètres du P/À, tu nas pas trouvé de doc dinstallation sur le net ?
Malheureusement rien de bien précis. J'ai le "NAC2/NAC3 commisionnning manual" mais il ne fournit pas les paramètres standards pour une configuration similaire => d'où ma question pour Navico... J'ai bien trouvé ça sur un forum US mais pour moi c'est du chinois... "I have found if going with a SimRad or RayMarine pilot in a Verado system, use the HyDrive Verado Solenoid manifold kit instead of a reversing pump..." (réponse #7) |
|
|
|
|
Journalisée
|
|
|
|
serval
SAUVETEUR SNSM
Membre Héroïque
 Hors ligne
Hors ligne
Messages: 5156
Marc
Posteur à 29%
 Firefox 132.0  Win 64
|
|
« Répondre #93 le: 19 Février 2021 11:44:25 » |
|
Traduction : "J'ai trouvé que si vous utilisez un pilote SimRad ou RayMarine dans un système Verado, utilisez le kit de collecteur HyDrive Verado Solenoid au lieu d'une pompe d'inversion" Tu faire traduire les forum directement en FR dans Chrome (parfois approximatif mais ca aide bien) De ce que je comprends il faut une pompe adapté au Verado un kit HYDRIVE comme ca peut etre ? https://www.cpperformance.com/p-109751-hydrive-fps-series-verado-outboard-inside-steering-kit.aspx |
|
|
|
|
Journalisée
|
 ACM 1100 Fly 2 X kamd 44 260 Ch 2008 a 2012 Cap Camarat 7.5 DC + 250 ch suzuki 2012 a 2015 Leader 9 2 x D3 200 cv 2015 à 2018 NC 33 2 x D3 220 cv 2018 à 2019 Antares 11 OB 2 x 300 cv Verado Blanc 2021 à 2024 Brig 6 Eagle Saint tropez Edition 2019 à 2021 Medline 6.8 avec 200 Suz' 2021 à....... Port d'attache : Cap d'Agde et Marseillan (34) |
|
|
|
|
Arnaud78
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 2437
Arnaud
Posteur à 29%
Safari 0.8.2 Mac OS
|
|
« Répondre #95 le: 19 Février 2021 18:22:32 » |
|
La question est donc : ai-je une "pompe d'inversion" ou un kit Hydrive ? D'origine, ma pompe de direction est celle-ci mais ça ne dit pas grand chose capot fermé (+ la pompe du pilote RPU80 - à vérifier) : 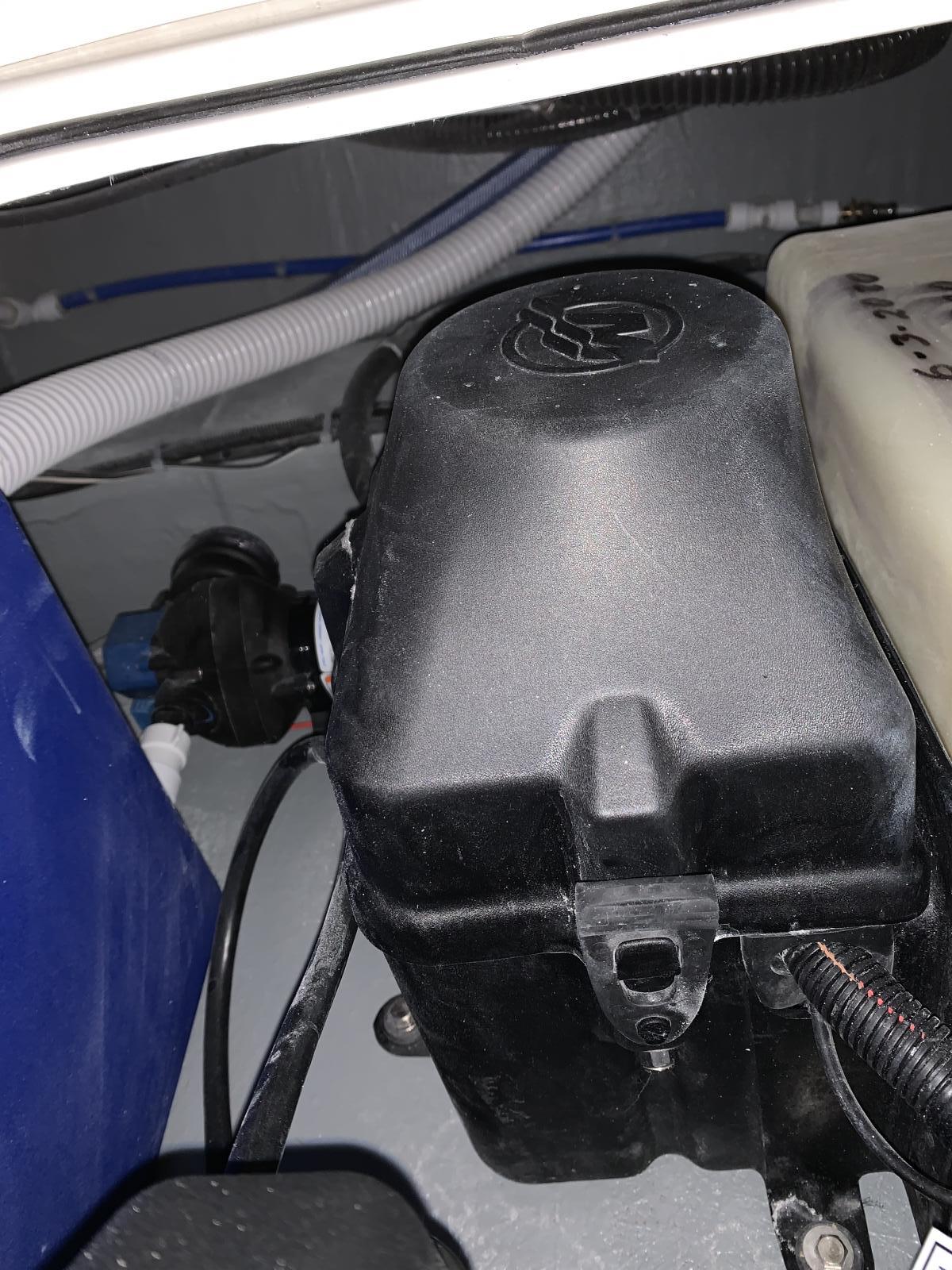 Et tu le comprends comment cette histoire toi Marco ? Il faudrait mettre une 2ème pompe comme la Verado d'origine à la place de la RPU80 ? |
|
|
|
|
Journalisée
|
|
|
|
Kalango
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 5648
Eric
Posteur à 36%
Safari 0.8.2 Mac OS
|
|
« Répondre #96 le: 19 Février 2021 19:03:34 » |
|
Le paramétrage permet les 2 configurations. Tu as juste à mettre ce que tu as vraiment  Pour les autres paramétrages (de ma compréhension, je n'y connais rien  ): Drive engage : CLUTCH Rudder deadband : je commencerais par AUTO, mais si l'AP n'arrête pas de zigzaguer pour maintenir le cap, je passerais en manuel en mettant la plus faible valeur de min rudder qui élimine ce défaut. La transition speed à 20 kts me parait élevée : elle doit être de l'ordre de ta vitesse de déjaugeage. Je mettrais 10 kts, soit tu navigues tranquille et t'es en-dessous et ton PA gèrera avec les paramètre basse vitesse, soit tu es déjaugé, et là, même tout réduit tu es au moins à 10-15 noeuds et ton P/A gèrera avec les paramètres TGV. Pour la configuration des changements de caps : Turn rate : ça doit être le nb de degrés par seconde. 3°/sec, c'est le standard... en avion ! C'est confortable, c'est ce que je fais par habitude quand je navigue en croisière. Le gain : c'est le coefficient par lequel l'erreur de cap va être multipliée pour déterminer l'angle de barre à appliquer pour corriger l'erreur... Trop fort, tu n'arrêtes pas de corriger dans un sens puis dans l'autre, trop faible, tu ne reviens jamais sur le cap.... Le counter rudder, c'est la valeur de barre qui permet d'arrêter le virage à temps. Trop fort, tu undershoot le virage; trop faible tu overshoote le virage, bref dans tous les cas, tu zigzagues dans le virage... Voilà ! Quand ta sonde marchera, tu pourras même configurer ton P/A pour suivre une ligne de sonde. Ce sera pour la saison 3 |
|
|
|
|
Journalisée
|
Eric
|
|
|
Arnaud78
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 2437
Arnaud
Posteur à 29%
Safari 0.8.2 Mac OS
|
|
« Répondre #97 le: 20 Février 2021 00:01:17 » |
|
Merci Eric ! Je pense passer au bateau demain pour aller noter mes paramètres actuels. Ensuite, je suis bon pour jouer avec les paramètres "turn rate", "rudder gain" et "counter rudder". Vu ce que tu as expliqué (sur le post de Bruno) concernant le fonctionnement du "virtual rudder feedback" qui se base sur le compas Precision 9, je m'interroge quand même sur la position de ce dernier qui est sous l'auge moteur (donc à moins d'1m du moteur je dirais). Sachant que dans le manuel, ils disent de le mettre au moins à 2m... Comme tu dis la ligne de sonde, ce sera pour la saison 3. Je serai déjà content que le reste fonctionne correctement  |
|
|
|
|
Journalisée
|
|
|
|
Kalango
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 5648
Eric
Posteur à 36%
Safari 0.8.2 Mac OS
|
|
« Répondre #98 le: 20 Février 2021 11:35:24 » |
|
Vu ce que tu as expliqué (sur le post de Bruno) concernant le fonctionnement du "virtual rudder feedback" qui se base sur le compas Precision 9, je m'interroge quand même sur la position de ce dernier qui est sous l'auge moteur (donc à moins d'1m du moteur je dirais).
Sachant que dans le manuel, ils disent de le mettre au moins à 2m...
Visiblement, le Precision 9 fonctionne avec un capteur de champ magnétique et des accéléromètres pour trouver le nord. Ca fonctionne en gros ainsi : A l'arrêt, l'accéléromètre mesure la gravité. Ca donne la verticale, qui n'est pas nécessairement alignée avec la verticale du boîtier. Une fois que la verticale est déterminée, on a facilement le plan horizontal, perpendiculaire à la verticale déterminée par l'accéléromètre. Le champ magnétique est mesuré. Le champ magnétique terrestre n'est pas horizontal, il plonge plus ou moins vers le bas. Donc le champ magnétique est projeté sur l'horizontale déterminée avant, ça donne le nord. L'angle entre le nord et l'axe du bateau donne le cap... Simple en théorie, plus compliqué en vrai. D'abord, avoir un bateau qui ne bouge pas sur l'eau c'est impossible. Mais en moyennant les valeurs de l'accéléromètre, on obtient quelque chose d'assez bon. Le plus compliqué reste la mesure du champ magnétique terrestre, puisque le capteur mesure outre celui-là tous les champs magnétiques créés par la circulation d'un courant dans un câble, et modifiés par la présence de masses métalliques... Il est possible de s'en affranchir lors de la Calibration du capteur (c'est le 360 qui t'es demandé pendant le process, ou celui qu'on fait sur nos smartphones). Mais d'un point de vue théorique, il faudrait faire des manips impossibles à faire avec un bateau pour éliminer ces perturbations correctement. Conclusion : moins tu as de perturbations, mieux c'est. Il faut donc éloigner le capteur de champ de toute masse métallique, courant électrique, etc... C'est clair qu'un moteur c'est une masse métallique et des impulsions électriques... L'alignement du capteur sur l'axe du bateau est également important, même s'il est corrigé lors de la Calibration du système. Les algorithmes un peu évolués prédisent l'évolution de la verticale en prenant en compte les accélérations sur les 6 axes par intégrations successives. Une erreur d'axe minime se cumule malgré tout assez vite. Pas bien grave, car finalement elle-même corrigée, mais ça nuit à la précision. Enfin, si tu compares le cap du Precision 9 à celui de ton compas, assure-toi de l'exactitude de la valeur du compas. Il a les mêmes défauts que le capteur de champ... Il ne faut donc pas oublier de le compenser ! Sans parler des objets qu'on laisse traîner à côté (j'ai fait un vol Etretat->Compiègne il y a fort longtemps dans un avion qui n'avait que la boussole comme moyen de navigation... En arrivant sur Compiègne, j'ai trouvé que l'aérodrome ressemblait fort à celui de ... Beauvais. Mon passager avait simplement posé son casque audio et l'aimant du HP à côté du compas  ). |
|
|
|
|
Journalisée
|
Eric
|
|
|
lomdurone
Membre Héroïque
 Hors ligne
Hors ligne
Messages: 4754
Denis - alienor 470 de 1989 - 40 yam 2011
Posteur à 30%
Firefox 105.0  Win NT 6.2
|
|
« Répondre #99 le: 20 Février 2021 12:11:09 » |
|
|
|
|
|
|
Journalisée
|
La dialectique de l'instant nous permet d'apercevoir cette nécessité comme l'unité du possible et ainsi surgit l'immédiateté de la perception du principe de la vitesse d'atteinte
Denis
|
|
|
Kalango
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 5648
Eric
Posteur à 36%
Safari 0.8.2 Mac OS
|
|
« Répondre #100 le: 20 Février 2021 13:10:08 » |
|
Tu as raison, quand on aimante on ne compte pas |
|
|
|
|
Journalisée
|
Eric
|
|
|
Arnaud78
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 2437
Arnaud
Posteur à 29%
Safari 0.8.2 Mac OS
|
|
« Répondre #101 le: 21 Février 2021 19:27:48 » |
|
Visiblement, le Precision 9 fonctionne avec un capteur de champ magnétique et des accéléromètres pour trouver le nord.
...
Conclusion : moins tu as de perturbations, mieux c'est. Il faut donc éloigner le capteur de champ de toute masse métallique, courant électrique, etc... C'est clair qu'un moteur c'est une masse métallique et des impulsions électriques...
L'alignement du capteur sur l'axe du bateau est également important, même s'il est corrigé lors de la Calibration du système...
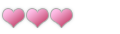
Bon ben effectivement ça peut être un bonne piste alors... Je vais tester de jouer sur les paramètres mais si ça ne fonctionne pas, je pense que je suis bon pour déplacer le compas... Voila où est actuellement positionné mon Precision 9 (installé par le concessionnaire) :  Le 9 est en direction du tableau arrière :  ... Mon passager avait simplement posé son casque audio et l'aimant du HP à côté du compas ). Ca c'est ballot quand même  Faut jamais laisser un Pierrot rôder autour de son bateau... |
|
|
|
« Dernière édition: 21 Février 2021 19:57:45 par Arnaud78 »
|
Journalisée
|
|
|
|
Arnaud78
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 2437
Arnaud
Posteur à 29%
Safari 0.8.2 Mac OS
|
|
« Répondre #102 le: 21 Février 2021 20:02:19 » |
|
Sinon, la bonne nouvelle c'est que j'ai fait mes devoirs : j'ai noté consciencieusement chacun des points du paramétrage actuel de mon pilote  Et la mauvaise nouvelle c'est que ma VHF ne démarre plus. Elle reste bloquée avec cet écran  |
|
|
|
|
Journalisée
|
|
|
|
serval
SAUVETEUR SNSM
Membre Héroïque
Hors ligne
Messages: 5156
Marc
Posteur à 29%
Firefox 132.0 Win 64
|
|
« Répondre #103 le: 21 Février 2021 20:48:40 » |
|
Peut être le fait d avoir rajouter un bouchon sur le nmea
Pour ton compas moi je le mettrais ailleurs pour tester
|
|
|
|
|
Journalisée
|
ACM 1100 Fly 2 X kamd 44 260 Ch 2008 a 2012 Cap Camarat 7.5 DC + 250 ch suzuki 2012 a 2015 Leader 9 2 x D3 200 cv 2015 à 2018 NC 33 2 x D3 220 cv 2018 à 2019 Antares 11 OB 2 x 300 cv Verado Blanc 2021 à 2024 Brig 6 Eagle Saint tropez Edition 2019 à 2021 Medline 6.8 avec 200 Suz' 2021 à....... Port d'attache : Cap d'Agde et Marseillan (34) |
|
|
Arnaud78
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 2437
Arnaud
Posteur à 29%
Safari 0.8.2 Mac OS
|
|
« Répondre #104 le: 21 Février 2021 21:42:40 » |
|
Peut être le fait d avoir rajouter un bouchon sur le nmea
Pour ton compas moi je le mettrais ailleurs pour tester
Je me suis fait la même réflexion pour la VHF. Je vais tester. Et oui tu as raison pour le compas, je suis en train de réfléchir à où le déplacer. |
|
|
|
|
Journalisée
|
|
|
|
Arnaud78
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 2437
Arnaud
Posteur à 29%
Safari 0.8.2 Mac OS
|
|
« Répondre #105 le: 26 Février 2021 16:19:17 » |
|
Peut être le fait d avoir rajouter un bouchon sur le nmea
...
Effectivement j'ai retiré le bouchon et elle fonctionne a nouveau. |
|
|
|
|
Journalisée
|
|
|
|
ski wake
Administrateur
Membre Héroïque
 Hors ligne
Hors ligne
Messages: 18741
Michel
Posteur à 48%
 Chrome 131.0.0.0  Linux
|
|
« Répondre #106 le: 26 Février 2021 16:37:42 » |
|
Bien joué Arnaud !  On progresse ! |
|
|
|
|
Journalisée
|
La passion du nautisme à ce point, c' est du vice , mais j' assume ! J' aime autant la plaisance à Voile qu'au Moteur ... ; les plaisirs sont différents ! "La Vie est trop courte, alors autant voyager en 1ère classe !" ( Philippe NOIRET ) Photo " Vague - Poseidon " de Mathieu Rivrin |
|
|
serval
SAUVETEUR SNSM
Membre Héroïque
Hors ligne
Messages: 5156
Marc
Posteur à 29%
Firefox 132.0 Win 64
|
|
« Répondre #107 le: 26 Février 2021 18:50:29 » |
|
Je me suis fait la même réflexion pour la VHF. Je vais tester.
Et oui tu as raison pour le compas, je suis en train de réfléchir à où le déplacer.
Si tu veux en etre sur sans trop te prendre la tete tu fais une installation volante et si c'est ça la tu te creuse la tete pour savoir ou le mettre. Un petit conseil, pas pret de l'electronique, des moteurs, des batteries, de diverses pompes etc..............Bon ok ca laisse pas grand choix En fait tout ce qui a un chant electromagnetique notament les enceintes |
|
|
|
|
Journalisée
|
ACM 1100 Fly 2 X kamd 44 260 Ch 2008 a 2012 Cap Camarat 7.5 DC + 250 ch suzuki 2012 a 2015 Leader 9 2 x D3 200 cv 2015 à 2018 NC 33 2 x D3 220 cv 2018 à 2019 Antares 11 OB 2 x 300 cv Verado Blanc 2021 à 2024 Brig 6 Eagle Saint tropez Edition 2019 à 2021 Medline 6.8 avec 200 Suz' 2021 à....... Port d'attache : Cap d'Agde et Marseillan (34) |
|
|
serval
SAUVETEUR SNSM
Membre Héroïque
Hors ligne
Messages: 5156
Marc
Posteur à 29%
Firefox 132.0 Win 64
|
|
« Répondre #108 le: 26 Février 2021 18:51:11 » |
|
Effectivement j'ai retiré le bouchon et elle fonctionne a nouveau.
Ca voudrait dire que le concess avait raison et qu'il y a une resistance dans la vhf, si toutefois tout le reste fonctionne correctement |
|
|
|
|
Journalisée
|
ACM 1100 Fly 2 X kamd 44 260 Ch 2008 a 2012 Cap Camarat 7.5 DC + 250 ch suzuki 2012 a 2015 Leader 9 2 x D3 200 cv 2015 à 2018 NC 33 2 x D3 220 cv 2018 à 2019 Antares 11 OB 2 x 300 cv Verado Blanc 2021 à 2024 Brig 6 Eagle Saint tropez Edition 2019 à 2021 Medline 6.8 avec 200 Suz' 2021 à....... Port d'attache : Cap d'Agde et Marseillan (34) |
|
|
|
ziak31
|
|
« Répondre #109 le: 27 Février 2021 19:13:36 » |
|
Bonjour Arnaud, Quelle est la fonction du Précision 9??? N'est-il pas trop prés de moteur (de la gouverne en fait) il y a peu d'angle d'incidence comparé à s'il était placé vers l'avant du bateau??? |
|
|
|
|
Journalisée
|
Philippe
|
|
|
Arnaud78
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 2437
Arnaud
Posteur à 29%
Safari 0.8.2 Mac OS
|
|
« Répondre #110 le: 01 Mars 2021 00:58:46 » |
|
Bonjour Arnaud, Quelle est la fonction du Précision 9??? N'est-il pas trop prés de moteur (de la gouverne en fait) il y a peu d'angle d'incidence comparé à s'il était placé vers l'avant du bateau??? Bonjour Philippe, Le Precision 9 est un compas. De ce que je comprends c'est lui qui fournit un maximum d'informations qui servent au calculateur du pilote. Il est effectivement possible qu'il soit trop près du moteur. Le manuel d'installation dit (traduction Google) : "Le compas Precision-9 peut être montée sur une surface plane ou une cloison, à travers un navire ou le long d'un navire. Sélectionnez un emplacement offrant un emplacement de montage solide et exempt de vibrations (autant que possible), et aussi près que possible du centre de roulis et de tangage du navire, c.-à-d. près de la ligne de flottaison. Il doit être aussi loin que possible des interférences magnétiques gênantes, par ex. moteurs (min 2 mètres), câbles d'allumage, autres gros objets métalliques et en particulier l'unité d'entraînement du pilote automatique. Sur les bateaux à coque en acier, il peut être monté à 0,75-1 m (2,5 à 3,3 pieds) au-dessus de la timonerie sur un support non magnétique, si aucune autre option n'est disponible." Cependant, via Discount Marine, j'ai eu échange avec un technicien Navico qui m'a demandé de vérifier la valeur du "champ local" (qui doit-être inférieure à 30%) et ça semble être bon dans mon cas = 19% Si tu veux en etre sur sans trop te prendre la tete tu fais une installation volante et si c'est ça la tu te creuse la tete pour savoir ou le mettre. Un petit conseil, pas pret de l'electronique, des moteurs, des batteries, de diverses pompes etc..............Bon ok ca laisse pas grand choix En fait tout ce qui a un chant electromagnetique notament les enceintes J'ai déjà réfléchi à un autre emplacement possible... mais reste à vérifier la possibilité / difficulté à passer le câble. L'installation volante est une bonne idée pour isoler le problème mais il faudra aussi refaire tout le calibrage et paramétrage. Dans tous les cas je pense que je suis bon pour passer quelques heures à jouer avec les paramètres... puis déplacer le compas et repasser quelques heures à jouer avec les paramètres... |
|
|
|
|
Journalisée
|
|
|
|
|
ziak31
|
|
« Répondre #111 le: 01 Mars 2021 08:33:55 » |
|
Bonjour Philippe,
Le Precision 9 est un compas. De ce que je comprends c'est lui qui fournit un maximum d'informations qui servent au calculateur du pilote.
Il est effectivement possible qu'il soit trop près du moteur.
Le manuel d'installation dit (traduction Google) :
"Le compas Precision-9 peut être montée sur une surface plane ou une cloison, à travers un navire ou le long d'un navire. Sélectionnez un emplacement offrant un emplacement de montage solide et exempt de vibrations (autant que possible), et aussi près que possible du centre de roulis et de tangage du navire, c.-à-d. près de la ligne de flottaison. Il doit être aussi loin que possible des interférences magnétiques gênantes, par ex. moteurs (min 2 mètres), câbles d'allumage, autres gros objets métalliques et en particulier l'unité d'entraînement du pilote automatique. Sur les bateaux à coque en acier, il peut être monté à 0,75-1 m (2,5 à 3,3 pieds) au-dessus de la timonerie sur un support non magnétique, si aucune autre option n'est disponible."
Cependant, via Discount Marine, j'ai eu échange avec un technicien Navico qui m'a demandé de vérifier la valeur du "champ local" (qui doit-être inférieure à 30%) et ça semble être bon dans mon cas = 19%
J'ai déjà réfléchi à un autre emplacement possible... mais reste à vérifier la possibilité / difficulté à passer le câble. L'installation volante est une bonne idée pour isoler le problème mais il faudra aussi refaire tout le calibrage et paramétrage.
Dans tous les cas je pense que je suis bon pour passer quelques heures à jouer avec les paramètres... puis déplacer le compas et repasser quelques heures à jouer avec les paramètres...
Bonjour Arnaud, Je pensais surtout "lacet" Je pense que tu gagnerais en précision en le plaçant au centre du bateau, ce n'est que mon avis, sur Evisa il est placé au niveau de la flottaison sous le pare brise. |
|
|
|
|
Journalisée
|
Philippe
|
|
|
|
Sharky
|
|
« Répondre #112 le: 01 Mars 2021 09:56:03 » |
|
Pour moi, le Précision 9 est placé dans la soute technique sur Tribord de la Mid Cabin  Il y a un calibrage du Précision 9 (via l'interface du HDS 12 Live dans mon cas). Il y a une mise à jour facultative du software du Précision 9 depuis le 4 février 2021 : https://downloads.lowrance.com/software/index.html?r=116 |
|
|
|
|
Journalisée
|
|
|
|
Kalango
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 5648
Eric
Posteur à 36%
Safari 0.8.2 Mac OS
|
|
« Répondre #113 le: 01 Mars 2021 10:02:32 » |
|
+1 il faut bien comprendre le fonctionnement de ce type de compas qui combine plusieurs informations fausses pour obtenir une valeur de cap précise. si on prend une boussole toute simple (aiguille aimantée) et quon se place sur un bateau, on est incapable de connaître son cap à un instant précis tellement laiguille bouge avec les mouvements du bateau. Par contre, on sait dire après quelques instants si on va globalement vers le nord plutôt que vers le sud. par ailleurs, si on sassoit et quon ferme les yeux, on va sentir la trajectoire du bateau (mer calme, sinon mercalm !)... pendant quelques secondes, au-delà desquelles on est désorienté. cest pareil avec le precision 9. du fait du mouvement de rotation du bateau autour des trois axes, la projection horizontale du champ magnétique (la direction du nord) est très instable et donc peu exploitable pour alimenter un pilote automatique. cest pourquoi sont ajoutés des capteurs daccélération et des gyromètres pour déterminer lattitude du bateau. Comme pour notre oreille interne, lintégration des accélérations pour obtenir une attitude cumule les erreurs et très rapidement, cette valeur est fausse. elle sera dautant plus fausse que le mouvement est complexe, ce qui est le cas lorsquon éloigne le capteur du centre de gravité du mobile. il existe des techniques de filtrage de ces données fausses qui permettent davoir une estimation du cap plus précise que la prévision de chacune des mesures. cest le même principe que celui quon utilise, certains sans le savoir, en navigation. On part dun endroit connu, on prend un cap, à une vitesse donnée, et pour un temps connu. Mathématiquement la position finale est connue. dans les faits, notre incapacité tenir un cap, la vitesse (et pour certains le temps ) , notre position réelle nest pas celle prévue. Alors on sort son compas de relèvement son sextant ou son GPS et on fait le point. on reporte cette position qui nest pas non plus la position réelle, puisquelle est également entachée derreur (on limagine bien avec compas de relèvement, moins avec un GPS). on réfléchit pour décider laquelle des 2 positions est la plus plausible, et on reprend le processus du cap, de la vitesse et de la montre, et du point. au final, on arrive arrive à passer entre les jetées dun port parfois pas plus éloignées de 50 mètres. en combinant des donnés justes sur du court terme mais imprécises sur le long terme (le cap et la vitesse) et dautres justes sur du long terme mais erronées sur du court terme(le point - pour comprendre la notion de court terme, essayez de faire le point sans avoir une idée de lendroit où vous êtes ), on parvient à connaître assez précisément sa position. Si nous revenons au compas, lintégration des accéléromètres nous donnent lattitude du bateau, qui va permettre de déterminer un cap sur du court terme. ce cap va être confirmé par des mesures du champ magnétique terrestre qui vont permettre de corriger lestime de lattitude et dobtenir un cap précis. la le long terme est de lordre de la seconde, le court terme de la ms voire moins. tout ça pour dire que oui il faut évidemment placer le capteur dans un environnement magnétique le moins perturbé (faire le point dans le brouillard, cest pas très pratique) mais aussi déviter de cumuler au déplacement du bateau sur sa trajectoire les mouvement de roulis, tangage et lacet qui sont amplifiés par léloignement du capteur du centre de gravité du bateau (lestime est plus compliquée si on ne sait pas tenir un cap!) lendroit proposé par Philippe sera bien meilleur que lactuel en terme de précision de fonctionnement. |
|
|
|
|
Journalisée
|
Eric
|
|
|
ski wake
Administrateur
Membre Héroïque
Hors ligne
Messages: 18741
Michel
Posteur à 48%
Chrome 131.0.0.0 Linux
|
|
« Répondre #114 le: 01 Mars 2021 16:06:04 » |
|
Eric, .... Si j' ai bien compris, toutes proportions gardées et , selon la formule que j' aime bien " toutes choses étant égales par elles mêmes" ( sacrée formule qui ne me semble pas signifier quelque chose  ) tes explications ressemblent au principe qui a prévalu quand il s' est agit de faire un GPS dit " différentiel " ... qui compensait les dégradations volontaires de signaux des GPS militaires pour des utilisations civiles... A l"époque de l'accès au GPS pour tous, par moments ( par ex lors de conflits au moyen Orient ... ) Volontairement les militaires US "dégradaient" les signaux captés par les GPS civils... Le but étant d'éviter que les forces ennemies ( elles aussu dotées de GPS , mais plutot " civils " ) ... aient autant de précision que les armées US... Alors des "petits" malins, en partant d'une position connue la comparait avec la position "dégradée" reçue et ... en déduisait la "correction" à appliquer à la position rendue volontairement "imprécise" pour la rendre aussi fiable que la position initialement seulement connue des forces US ...  Bref il s'agit d'un recalcul quasi permanent ( en intégrant les données perçues des accéléromètres et autres gyroscopes ) qui permet de limiter l' erreur Arnaud, je t' avais bien dit de ne pas t' encombrer d'un Pilote automatique Ha Ha ! ... mais bon .... |
|
|
|
|
Journalisée
|
La passion du nautisme à ce point, c' est du vice , mais j' assume ! J' aime autant la plaisance à Voile qu'au Moteur ... ; les plaisirs sont différents ! "La Vie est trop courte, alors autant voyager en 1ère classe !" ( Philippe NOIRET ) Photo " Vague - Poseidon " de Mathieu Rivrin |
|
|
Kalango
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 5648
Eric
Posteur à 36%
Safari 0.8.2 Mac OS
|
|
« Répondre #115 le: 01 Mars 2021 17:19:32 » |
|
Sur le principe, effectivement ça consiste à corriger l'erreur... le DGPS connaît sa position et envoie l'écart entre la position donnée par le GPS et sa position. L'erreur est déterminée, et c'est là où toutes les choses ne sont pas égales ! Dans le cas du compas, personne n'est capable de déterminer l'erreur. On dispose simplement de deux signaux qui disent l'un je pense que tu es là, et l'autre non, moi je pense que tu es là. Et c'est donc à toi d'estimer l'erreur sans autre information. Alors en fait, on dispose d'une autre information. On sait que l'un des signaux (l'accéléromètre) est fiable sur une courte échéance, et l'autre (magnétomètre) est fiable sur du long terme (en moyenne). On va donc privilégier l'information des accéléromètres au début, et plus le temps va passer, plus on va faire confiance au magnétomètre. Ce n'est pas non plus au début de la journée je regarde l'accéléromètre, et en fin de journée, je regarde l'aiguille... non, la confiance accordée à chaque signal est adaptée par un savant calcul de filtrage au fur et à mesure du temps et finit par se stabiliser (assez vite en général). On obtient alors une estimation de bien meilleure qualité que signaux de base. Magique ? Non, mathématique Ceux que ça intéresse peuvent rechercher par exemple "filtre de Kalman" qui est l'exemple le plus connu des filtres optimaux. ça ne me rajeunit pas Michel. |
|
|
|
|
Journalisée
|
Eric
|
|
|
serval
SAUVETEUR SNSM
Membre Héroïque
Hors ligne
Messages: 5156
Marc
Posteur à 29%
Firefox 132.0 Win 64
|
|
« Répondre #116 le: 01 Mars 2021 18:21:40 » |
|
Pour moi, le Précision 9 est placé dans la soute technique sur Tribord de la Mid Cabin Il y a un calibrage du Précision 9 (via l'interface du HDS 12 Live dans mon cas). Il y a une mise à jour facultative du software du Précision 9 depuis le 4 février 2021 : https://downloads.lowrance.com/software/index.html?r=116Mais je comprends pas le precision 9 c'est en gros le gyroscope / GPS du bateau pour le pilote auto mais tu as pas de pilote sur ton bateau JL, alors ca sert à quoi le precision 9 ? |
|
|
|
|
Journalisée
|
ACM 1100 Fly 2 X kamd 44 260 Ch 2008 a 2012 Cap Camarat 7.5 DC + 250 ch suzuki 2012 a 2015 Leader 9 2 x D3 200 cv 2015 à 2018 NC 33 2 x D3 220 cv 2018 à 2019 Antares 11 OB 2 x 300 cv Verado Blanc 2021 à 2024 Brig 6 Eagle Saint tropez Edition 2019 à 2021 Medline 6.8 avec 200 Suz' 2021 à....... Port d'attache : Cap d'Agde et Marseillan (34) |
|
|
Kalango
CLUB DES DETENDUS DU PARE-BATTAGE
Membre Héroïque
Hors ligne
Messages: 5648
Eric
Posteur à 36%
Safari 0.8.2 Mac OS
|
|
« Répondre #117 le: 01 Mars 2021 19:20:29 » |
|
A afficher la dérive par exemple.
|
|
|
|
|
Journalisée
|
Eric
|
|
|
|
Phil06
|
|
« Répondre #118 le: 02 Mars 2021 16:54:18 » |
|
Bonjour
Affichage NMEA 2000® du ROT et du cap suivi Grâce à la connexion NMEA 2000®, le compas Precision-9 de Simrad fournit des informations concernant le cap suivi, le taux de giration (ROT), le tangage et le roulis à tout équipement connecté, dont les pilotes automatiques, le radar, les écrans multifonctions et les autres systèmes de navigation. Technologie de capteur à semi-conducteurs Le compas Precision-9 comprend une antenne à capteurs à semi-conducteurs sophistiquée basée sur la technologie MEMS. Cette antenne de haute précision mesure les mouvements de neuf axes séparés, afin de calculer les informations de cap suivi et de taux de giration le plus précisément possible. Cela permet d'éviter de nombreuses restrictions courantes des compas électroniques Fluxgate conventionnels et d'offrir une précision du cap suivi de ±2 degrés après étalonnage. Installation quasiment n'importe où Un étrier de montage facilement réglable permet d'installer le compas Precision-9 sur n'importe quel bateau, quasiment n'importe où. Le compas peut également être installé directement sur n'importe quelle surface plane et, grâce à un indice d'étanchéité IPX7, il est possible de l'installer à l'extérieur, au sommet du mât, sur les bateaux à coque en acier afin d'éviter l'interférence magnétique. L'installation est encore simplifiée par la connectivité NMEA 2000®, grâce à un câble unique d'alimentation et de données.
|
|
|
|
|
Journalisée
|
Philippe
|
|
|
|
Sharky
|
|
« Répondre #119 le: 02 Mars 2021 17:33:04 » |
|
Mais je comprends pas le precision 9 c'est en gros le gyroscope / GPS du bateau pour le pilote auto mais tu as pas de pilote sur ton bateau JL, alors ca sert à quoi le precision 9 ?
Ce n'est pas que pour le pilote auto Marc. Le Précision 9 m'est indispensable pour superposer l'image de mon radar Halo 20+ et l'image de la cartographie, et également faire du MARPA, et bénéficier de la fonction Velocity Track (faut que je me familiarise plus cette année avec ces deux fonctions). Je navigue toujours avec la carto orientée "Nord en haut". |
|
|
|
|
Journalisée
|
|
|
|
|







